Extending Capability

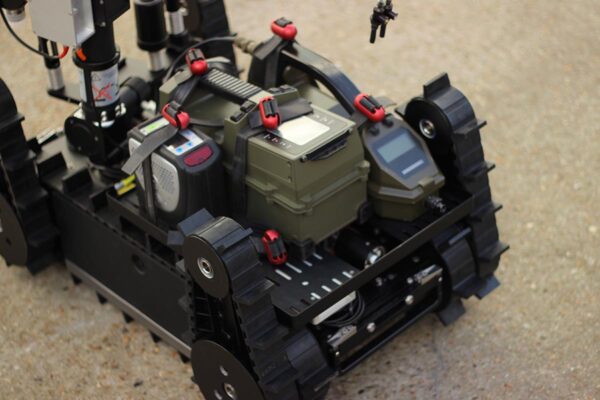
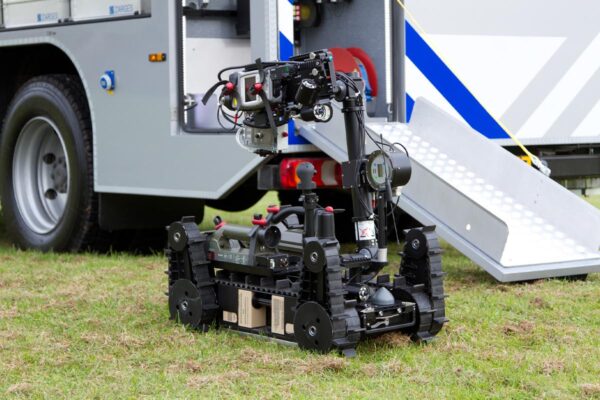
A robot should not just be a surveillance platform, but be able to deliver a wide range of other capabilities such as render safe tools or CBRNe techniques. Mini ROV has the strength and ability to carry a considerable range of additional payload tools.
- There are many different types of barrelled disruptors on the market which can make having all required mounting accessories impossible, not to mention the knowledge of their use.
- You might have different systems from different manufacturers and need to hold them all.
- You need to mount & dismount them quickly and this can take minutes, perhaps unacceptable on a time critical mission.
- You need to mount & dismount them quickly and this can take minutes, perhaps unacceptable on a time critical mission.
- With Mini ROV it is possible to fully prepare the disruptor prior to mounting, and then fit in seconds, just prior to the start of the mission.
- Mini ROV is the first EOD robot to have a fully universal disruptor mounting system capable of holding the following systems:
Chemring
– RE70
– RE50
– RE12
– RE70
– RE50
– RE12
– Viper
– Mamba
CTS Canada
– Lance
– Mamba
CTS Canada
– Lance
AB Precision
– ABL3000
– ABL3000L
– ABL2000
– ABL2000L
– ABL1000
– ABL3000
– ABL3000L
– ABL2000
– ABL2000L
– ABL1000
Richmond
– Vulkan
– Vulkan
PropArms
– 12.5mm
– 20mm
– 29mm Recoilless
– 12.5mm
– 20mm
– 29mm Recoilless
Generic
– Pig Stick
– HotRod
– Pig Stick
– HotRod
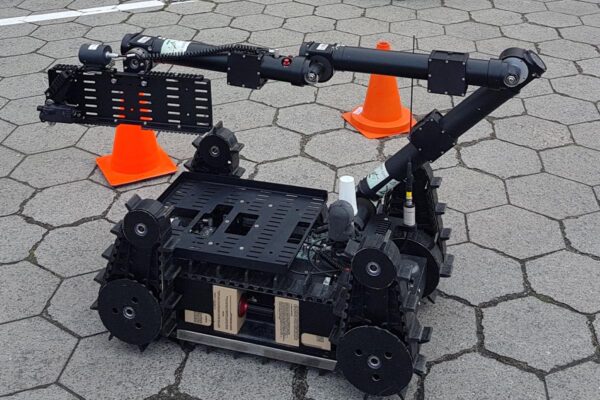
- Mini ROV’ unique disruptor mounting system allows you to maintain the claw on the end of the arm. This maintains and maximises your capability.





- You need to position and aim disruptors quickly and accurately.
- Mini ROV’ long and dexterous arm can reach up to 2m in height to fire disruptors horizontally for example into airplane overhead lockers.
- Viewing the potential target and the barrel of the disruptor is possible with the 5th camera that can be mounted onto the universal disruptor holder.
- The disruptor can also be viewed through Mini ROV’ other cameras, including for example the pan tilt, to maximise your situational awareness.
- Mini ROV also has the ability to visually display the mounted disruptor on the control unit screen real time graphic. This helps the operator gain an understanding of how the mounted disruptor is orientated on the robot.
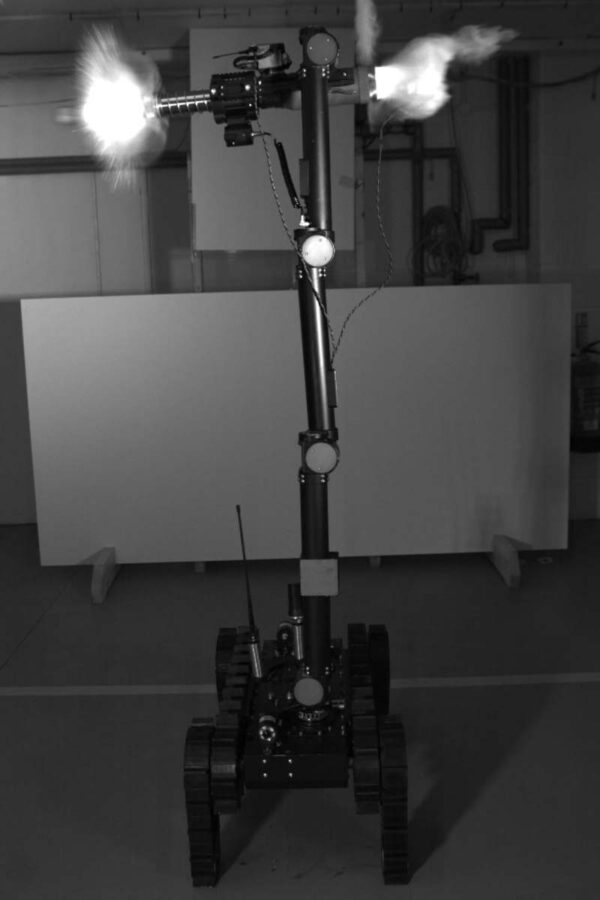
- A unique feature is the ‘blast back cylinder’ which shows the path of the discharged effluent from the rear of recoilless disruptors or path of recoiling disruptors. This helps the operator ascertain whether that rearwards discharge presents a threat to either the surrounding environment or the robot.
- Stand-off firing is recognised as one of the hardest tasks to achieve when firing a disruptor from a robot. Many systems try to use high powered lasers, but not only can these be hard to see on most terrains (especially outdoors) but can present a safety risk to the operator.
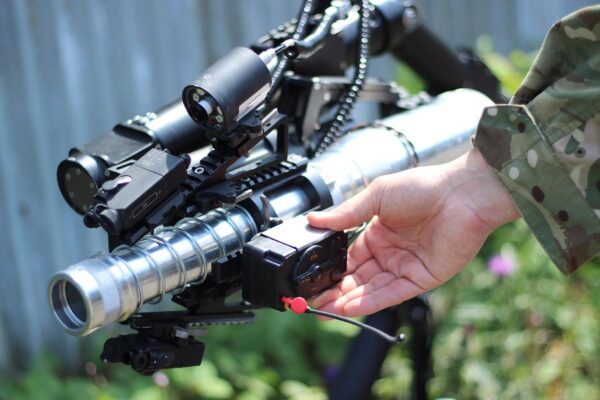
- Mini ROV has a unique and patented stand-off system that uses twin cameras to aim. Accuracy of up to +/-5mm can be achieved over a 30m range without the use of lasers. No other robot on the market can achieve the consistency and accuracy of long range stand-off that Mini ROV can.


User-Filled Explosive Charges
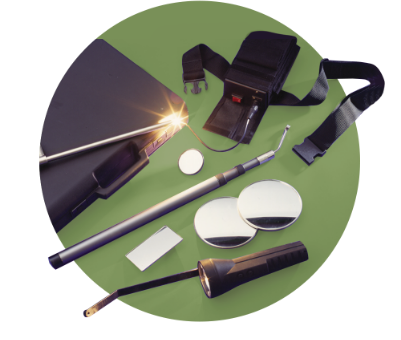
- User filled charges such as the Alford system are an essential tool in the arsenal of Render Safe Procedures.
- Placing charges is easy with the gripper, long and dexterous arm and multiple camera set up.
- You need to deploy multiple Alford systems with a single robot approach and this can be achieved with the range of simple tools.
- ‘The Twin Pole’ will allow the deployment of a window breaker and water bottle charge in one approach. The twin pole design maximises rigidity during deployment using low cost, easily replaceable household plastic pipe. ‘The Twin Pole’ can even be left on target with the mineral water bottle and the robot retracted to a safe distance.
- The DemiMod and MiniMod are also easily deployed with ‘The Twin Pole’



- MajorMod presents no problems due to Mini ROV’ strong arm, which simply places MajorMod using its own stand. No special tools, apart from a piece of rope are required.


- BootBanger, a very heavy tool, also presents no problems for Mini ROV. Delivered on the C-IED and EOD robot chassis, held in a simple bracket, once on target, Mini ROV’ strong arm lifts and positions BootBanger into place.
- Initiation can be by single use disposable receiver, or utilising the light weight firing cable reel mounted onto the side of Mini ROV’ arm.



Firing Circuits
- Firing or initiating EOD tools is a crucial task. 100% reliability and safety are prerequisite.
- You may already have in-service proven, tested and evaluated firing systems but the introduction of a new robot could bring yet another ‘unknown’ firing system into your service.
- This is not the case with Mini ROV. Mini ROV can take your existing firing system and simply clip it onto the robot.
- Firing systems, due to their high levels of safety, are extremely expensive, but using your existing system means you are not paying for that capability twice.
- Reduced training is an immediate benefit as your teams will not have to learn to use another firing system and yet another advantage is that should your firing system fail for any reason, you can simply unclip it and change it within seconds. Your robot is then back up and running, repaired by an operator in the field and not a technician in a workshop.


CBRNe
- Your area of operation may be CBRNe, which brings its own unique set of requirements.
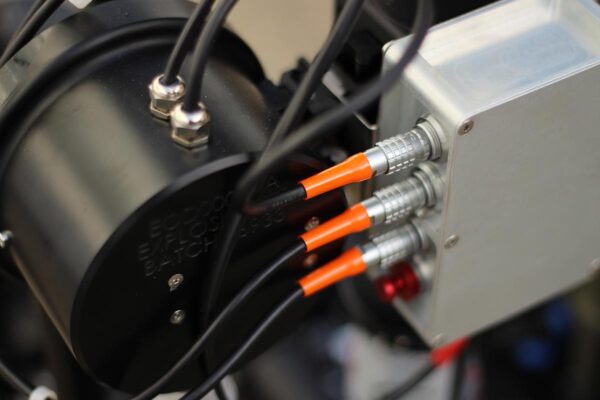
- Various options are available including 1, 2 & 4 channel systems for firing multiple tools.
- Each CBRNe incident will be unique and a robot platform that can integrate a wide range of sensing capability is essential.





- You will be able to reduce the risk to operators by sending in Mini ROV, which can carry out visual assessment of the suspect area and then deploy the required sensors to report back in real time information about the incident contamination, and then finally, if required remotely deploy any mitigation or containment systems.
- Once data about the potential risk is obtained from the sensors mounted on Mini ROV, a prediction can be made about the potentially hazardous area and actions taken to make safe the area or evaluate as required.





- Virtually any sensor may be fitted to Mini ROV using its universal equipment mount. This mount is not sensor specific and can accept many different shapes and sizes of sensor.
- You may have a sensor that needs to approach a suspect material, and these can be mounted on the manipulator equipment mount at the end of the arm. This allows a sensor to be carefully positioned using cameras and if necessary aiming lasers.
- But what about sensor data? Again, no problem for Mini ROV. As long as the sensor has a data port and can output data, Mini ROV can accept a wide range of data transfer protocols such as RS232, RS422, RS485 and USB to name but a few and transfer the sensor data back in real time to the control unit.
- You may have multiple sensors that need to be mounted, and again this is easily handled by Mini ROV. There are 2 data ports on the chassis, but if more than 2 sensors are required, the data port hub may be used, expanding the number of ports to 4. As there are 2 data ports on the chassis, the application of 2 hubs expands this to 8 available data ports. Hubs can be chassis mounted or arm mounted, dependant on which is the most suitable location for mounted sensors.
- Critical data from the sensors is then sent back to the control unit, and can either be displayed on the control unit screen or passed out to a central command and control system via the control unit’s Ethernet port.
- Sensors may also be controlled via the robot’s control unit carrying out commands such as switch on/off or changing settings.
- For scenarios where Mini ROV may encounter an explosive environment, an explosive gas detector is available as an option. This will detect if Mini ROV has entered an explosive atmosphere and report a warning back to the operator. The operator then has the choice to either fully shutdown Mini ROV which will completely disconnect the batteries and remove any risk of explosion due to electrical spark, or continue with the mission. If the user chooses to continue with the mission, the warning will remain active until the explosive risk has gone away.
- If you use sorbent or Tenax tube sampling, then Mini ROV has an optional tube sampling system that can be mounted either on the arm for point detection or on the chassis for general sampling.
- To avoid tube saturation and break through, a twin tube system is available with 1 tube sampling at a very low rate and the other at a very high rate. If there are very low concentrations of contaminant the high rate sampling tube will be able to take an adequate reading, and if there are very high levels of contaminant the low rate sampling tube will take an adequate reading without the risk of breakthrough. All settings including sampling rate and time may be controlled via the control unit.


Cleaning And Decontamination
- Decontamination with common and widespread techniques is a critical capability of your robot and Mini ROV was designed from the ground up with decontamination as a core capability.
- Mini ROV is waterproof to IP65. This means it can be washed down without the risk of any liquids causing damage.
- It can even be cleaned with a pressure washer following strict guidelines.
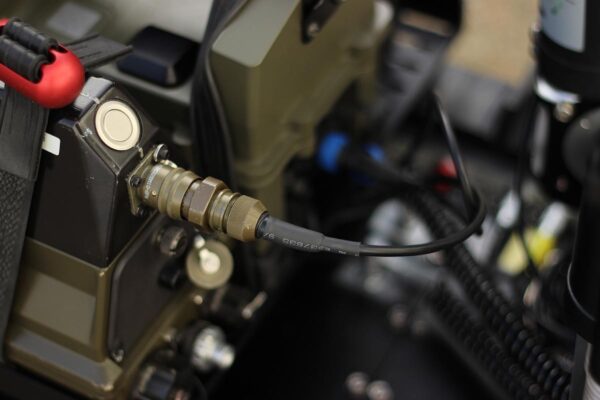
- Water entering sockets or connectors is not a problem as they are all waterproof when mated or fitted with a blanking cap.
- Chemical resistance is also a key benefit as Mini ROV is manufactured from chemical resisting materials and finishes. A Chemical Agent Resisting Coating (CARC) paint is applied to all exterior surfaces, and any exposed metal parts are either stainless steel or titanium which are highly resistant to all forms of decontamination and many chemicals.
- Plastics and rubber used in the construction have been carefully chosen to ensure resistance to a wide range of decontamination processes and chemicals.



- The modular construction of Mini ROV allows it to be dismantled for deeper more through decontamination. A phased system of decontamination is undertaken, removing modules at each level, and techniques to ensure that each module remains watertight whilst it is decontaminated separately.
- But being resistant to decontamination is not the only aspect a CBRNe robot must be capable of. Strict design guidelines (as detailed in NATO Stanag AEP7) have been followed to ensure there are no sharp edges in the design that could cut or tear chemical resistant gloves, the ability to operate Mini ROV in full CBRNe clothing including switching on and off, changing batteries and plugging sensors in have also all been carefully analysed.
- Chemical resistance is a critical factor for a CBRNe robot. Not only have Mini ROV’ materials and finishes been chosen to resist decontamination but also their chemical resistance has been considered. It would be impossible to design a system that was 100% resistant to all chemicals at all concentrations and elevated temperatures. However, by using NATO Stanag AEP 7’s 9 representative Toxic Industrial Chemicals (TIC), it is possible to determine which TICs and at what concentrations will cause damage and which Mini ROV is resistant to. Please contact us for more detailed information.


Equipment Mount Plates
- You need a system that is future proof, one that can expand as your requirements change. Tomorrow’s requirements will be different to today’s requirements and a high value investment must be able to adapt to new threats.
- Mini ROV has a number of ways to integrate new capabilities.
- The universal equipment mount plates can hold a wide range of differing tools. A chassis mounted plate and an end of arm mounted plate allow a range of tools to be mounted. Point detection equipment is especially suitable for mounting on the end of the arm.
- Water entering sockets or connectors is not a problem as they are all waterproof when mated or fitted with a blanking cap.
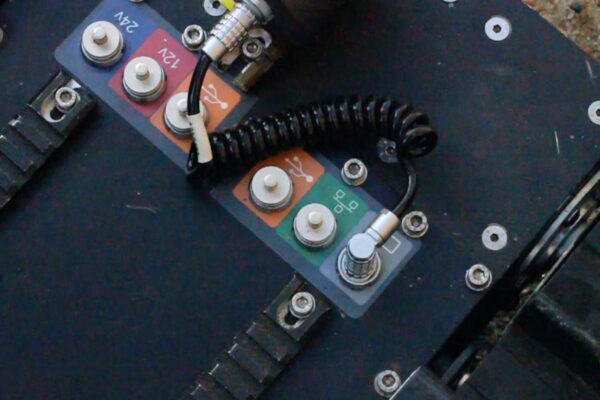
- If you need additional power, auxiliary power supplies (12v and 24v) exist at strategic locations around the robot.
- If you need to communicate with your additional tools, such as CBRNe sensors, data ports also are located on the chassis that can communicate with a wide range of protocols without the need to fit additional radios or tethers.
- Not only can you control your equipment, but data may be passed out and back to the control unit using the robot’s communication system. Once the data is back at the control unit it may be logged or transferred out to a central command and control system.
- If you need multiple additional tools, a USB 4-port hub is available to increase the number of data ports.
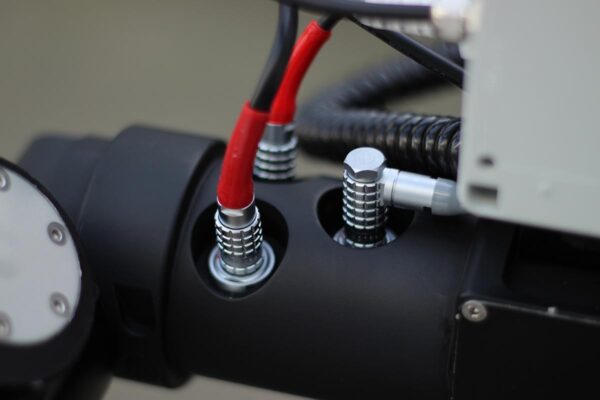
- Are you concerned about the wrong plug being fitted to the wrong socket causing damage? That is not an issue with Mini ROV because all plugs and sockets have a unique key making it impossible to fit the wrong plug into the wrong socket. Coupled with colour coding, you can quickly identify which connectors go where and not worry about the risk of damage should an operator try to put the wrong plug in a socket.
Sensor Integration
- As well as the detailed CBRNe application of sensors, a wide range of other sensors may be mounted on Mini ROV. In fact, any sensor which has the ability to be remotely controlled via a communications port may be mounted on Mini ROV and controlled by the control unit. Contact us for more information on integrating sensors to suit your specific application.

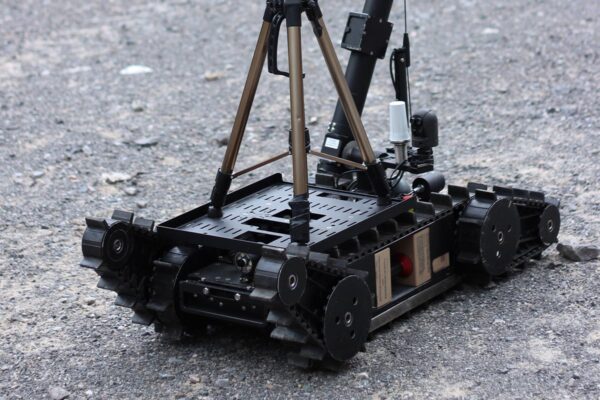
X-ray Systems
- Mini ROV has a universal X ray holder system that can hold a wide range of X ray generators and plates from many different manufacturers.
- X Ray generators may be either held in the universal frame or chassis mounted for optimum performance.

Bi Directional Audio
- Sound is an important sense that you don’t want to lose working remotely. Being able to hear what is happening remotely at the robot helps in situational awareness and Mini ROV’ optional 2 way audio system allows not only the operator to hear what is happening but to also to talk to any potential insurgent, including recording it.



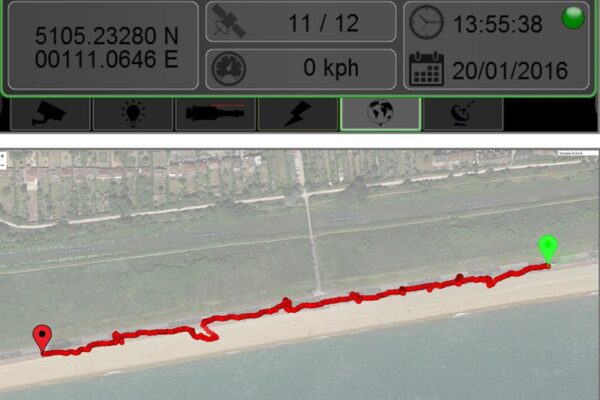
Global Positioning System (GPS)
- Mini ROV has an optional GPS system, allowing the robot to report its position back to the control unit. This can then be mapped using various systems. Contact us for more information on integrating GPS to suit your specific application.